")
")
")
")

Mikrokopter -Hexakopter - Drone
Am Anfang:
Heutzutage kann man eine Drohne fast überall kaufen, ganz ohne Montage oder Ähnliches, Karton öffnen, Akku einlegen, einschalten, fliegen und mit dem Fotografieren oder Videodrehen beginnen. Damals war alles anders.
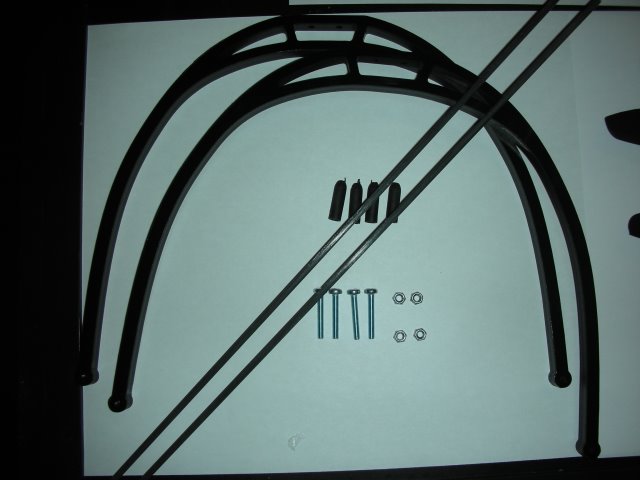
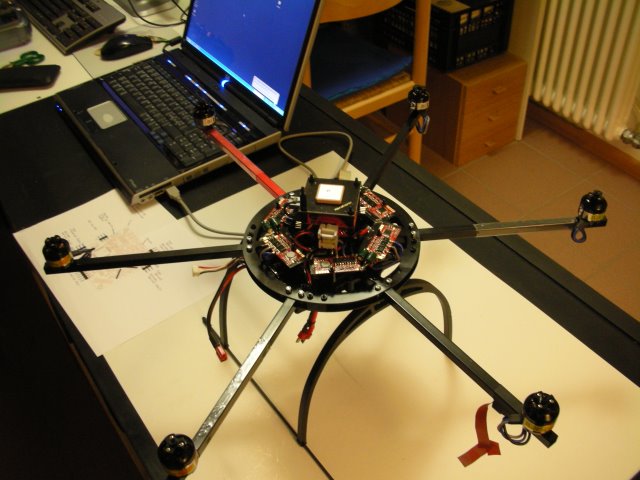
Im Jahr 2008 habe ich einige schöne deutsche Webseiten über einige Amateure gesehen, die eine Drohne (Quad, Hexa, Octo) entwickelt hatten, alle mit Open-Source-Firmware und gut konstruierter Hardware. Es gab auch ein Forum (das leider verschwunden ist), in dem die gesamte „Mikrokopter-Community“ ihre Erfahrungen austauschte und Hinweise und Tipps gab, wie man die Gesamtleistung der eigenen Drohne verbessern kann. Es war sehr interessant und ich beschloss, eines der früheren Modelle zu kaufen, einen sogenannten Hexakopter. Ja, mit einem „K“ geschrieben, da alles auf Deutsch basiert ist. Das Paket kommt als eine Art DIY-Projekt, alle Teile sind vorhanden, aber man musste es selbst bauen und montieren, eine frühe Art von IKEA-Sachen. Wenn Sie alles auspacken, sieht es ungefähr so aus.







Auf der Website Mikrokopter.de gab es eine eigene Seite it eine Anleitung zum Zusammenbauen, es war eine sehr umfangreiche Dokumentation und ich hatte keine Schwierigkeiten, die „Standard“-Version des Hexakopters zu bauen. Grundsätzlich gibt es drei verschiedene Dokumente, das erste über die Elektronik, die Leiterplatte und dergleichen. Der zweite Typ ist der mechanische Aufbau mit all den winzigen Schrauben, Buchsen, Muttern usw. Der dritte und wichtigste Teil war die Firmware, das Laden und Anpassen für die Verwendung durch einen „Neuling“ wie mich.
Ich habe zunächst den mechanischen Teil aufgebaut, weil man eine solide Basis braucht, auf der man später die Elektronik aufstellen kann. Hier einige Bilder des Prozesses.
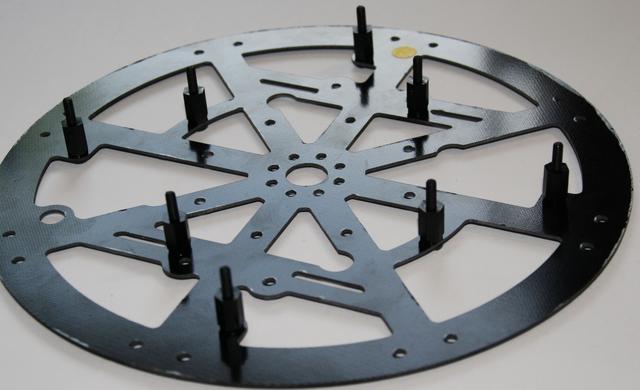

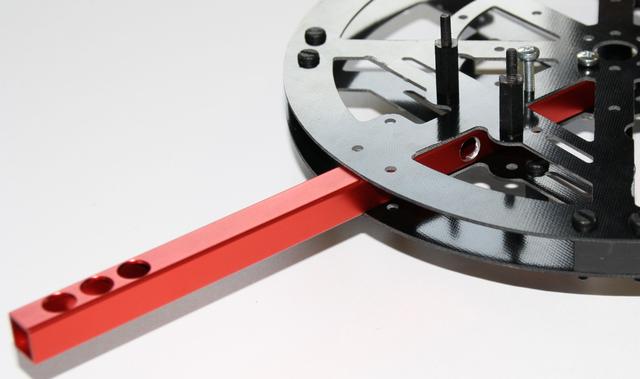
Das rote Aluminiumprofil dient als Hauptträger als Motorhalterung, die rote Farbe (nur einer der Träger) zeigt die Vorderseite der Drohne an. Die anderen 5 sind schwarz und wurden nachträglich eingebaut.


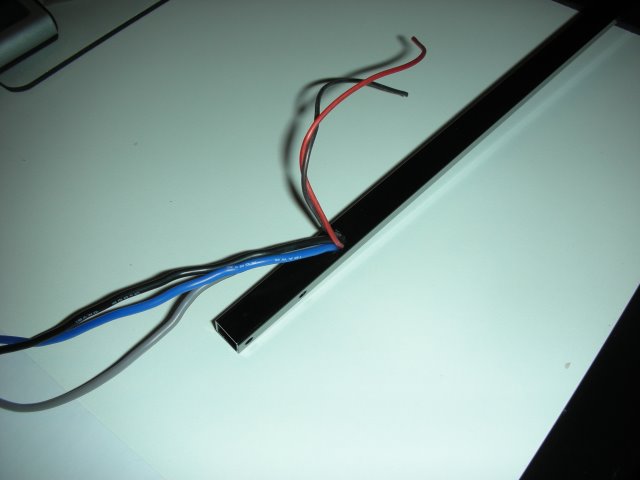
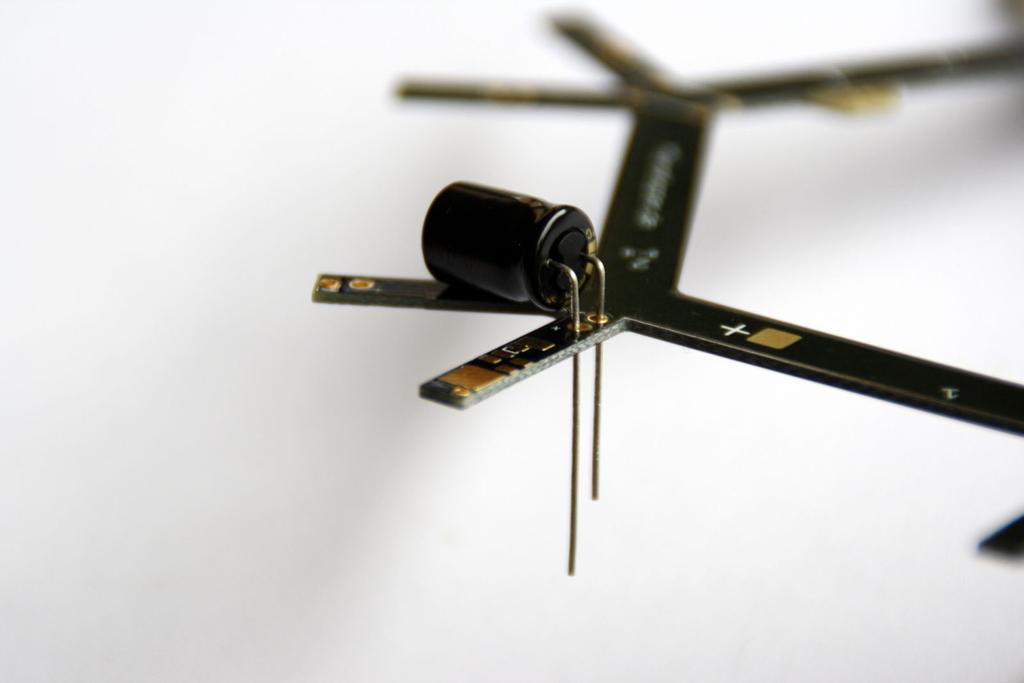
Dann wurden die bürstenlosen Motoren montiert und gleichzeitig habe ich die Drähte für die LED-Streifen eingeführt, die unter den Balken montiert werden sollen. Ein LED-Streifen wird auf dem roten Strahl mit roten LEDs angebracht, um die Ausrichtung der Drohne bei schlechten Sichtverhältnissen zu erkennen. Die anderen beiden LED-Streifen, grün, wurden auf der Rückseite montiert. Auf den ersten Blick scheinen all diese Kabel usw. ein bisschen Chaos zu verursachen, aber die Entwickler haben auch darüber nachgedacht und eine Art elektrische Verteilerscheibe geschaffen, in der alles sauber zusammenkommt.



.
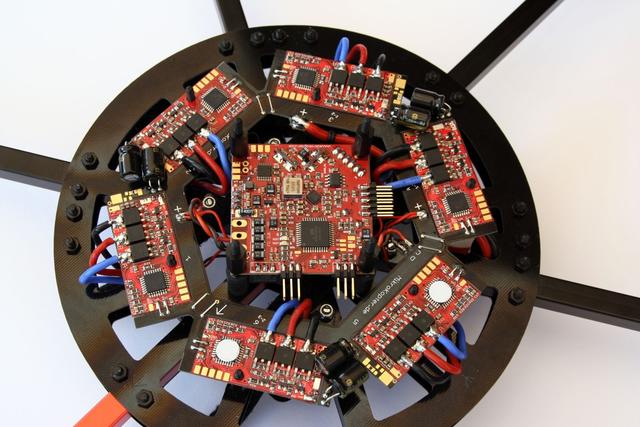
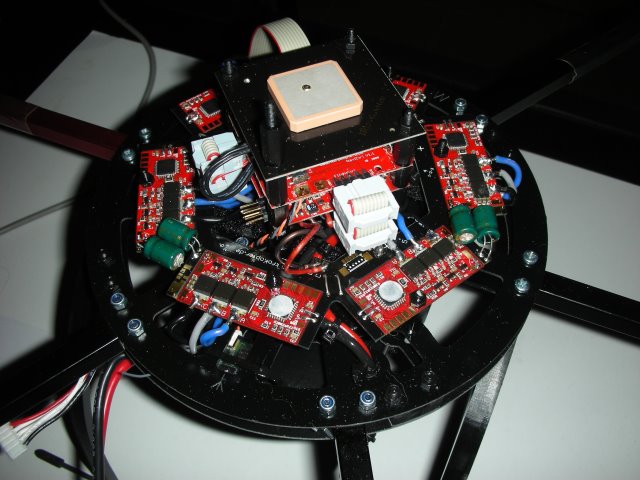
Das Verteilungssechseck mit den Motortreiberplatinen
Jetzt die Balken. Nachdem die Motoren und das Verteilungssechseck fertig sind, bleibt noch Zeit, etwas Elektronik zusammenzubauen, wie zum Beispiel die Motortreiber, das GPS-System, den Flugregler und den Empfängerteil. Es war ein langer und langsamer Schritt-für-Schritt-Prozess, um Fehler zu vermeiden, da ein rauchiger Start sehr teuer gewesen wäre.
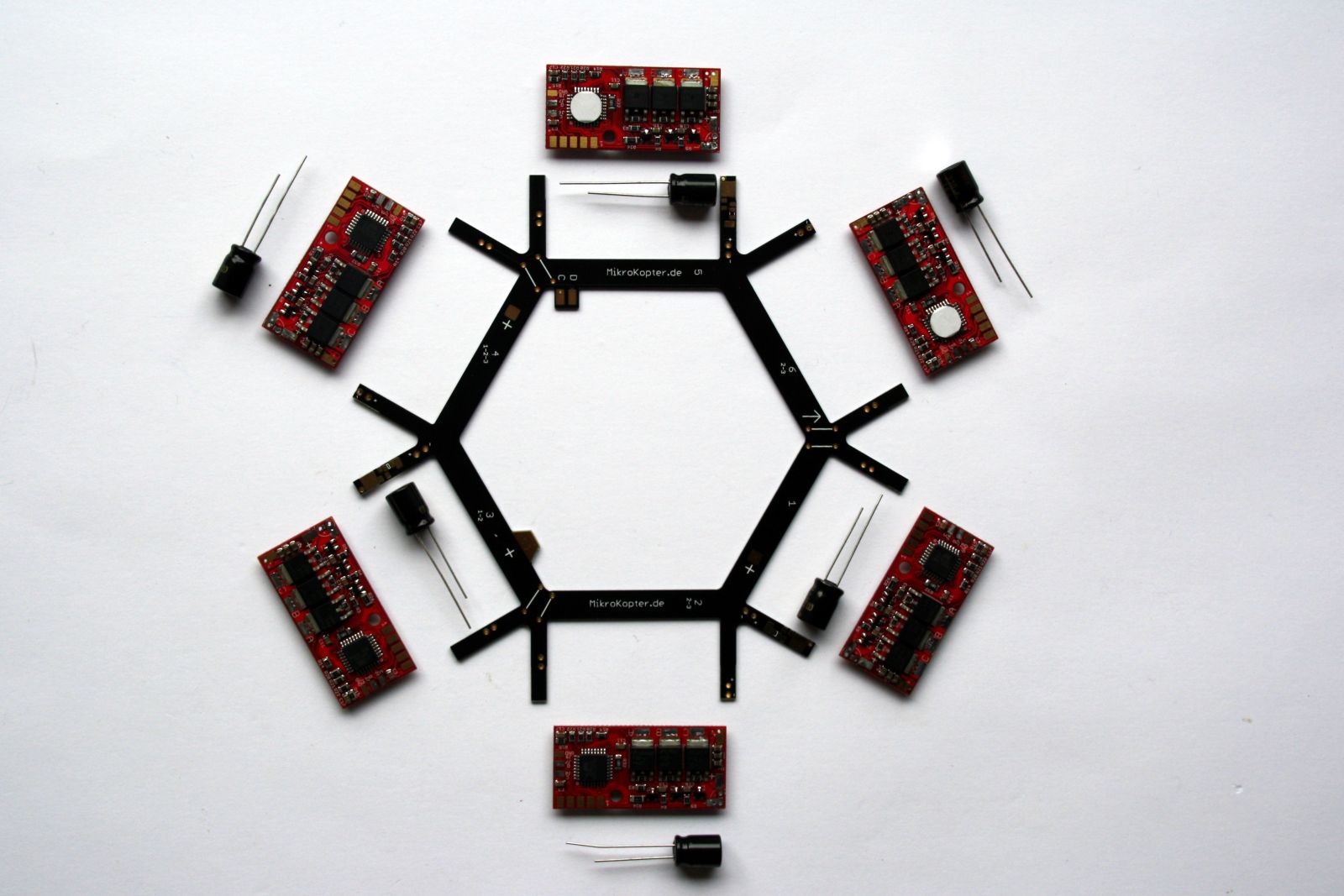
Das Verteilungssechseck mit den Motortreiberplatinen
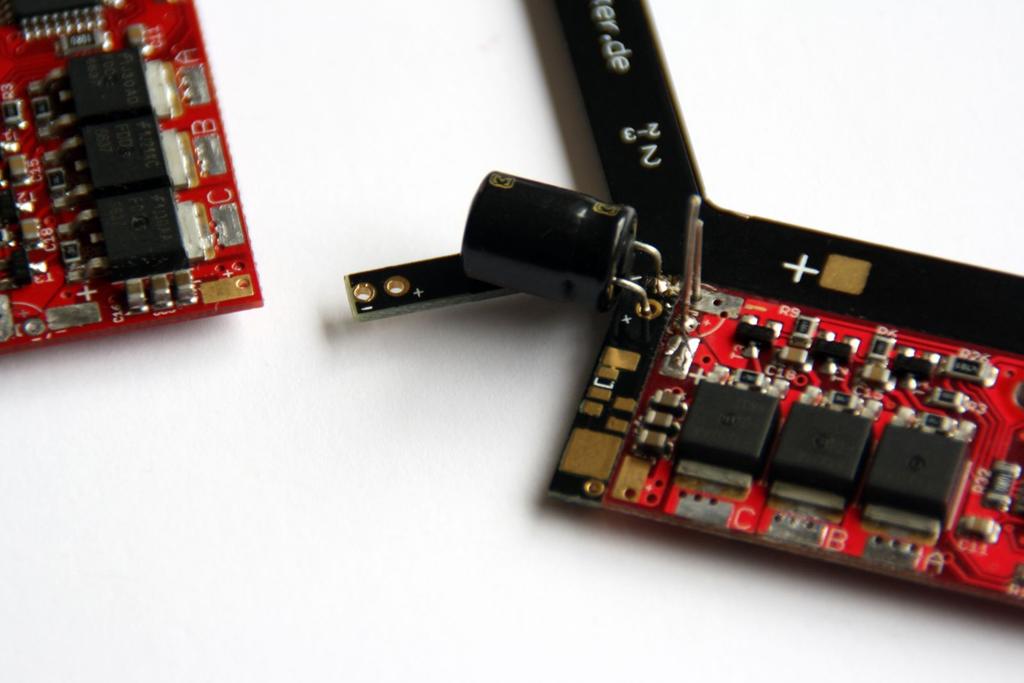
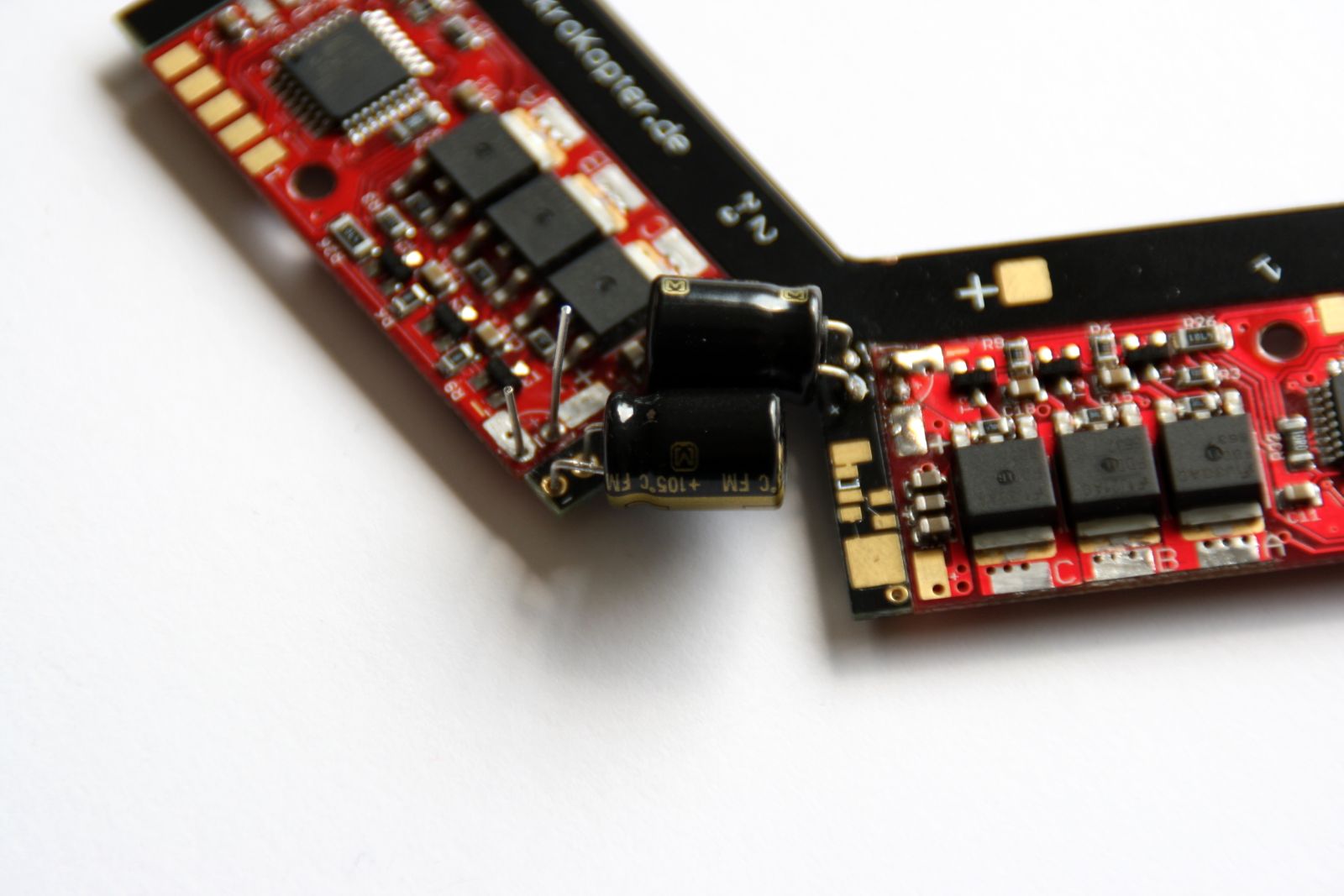
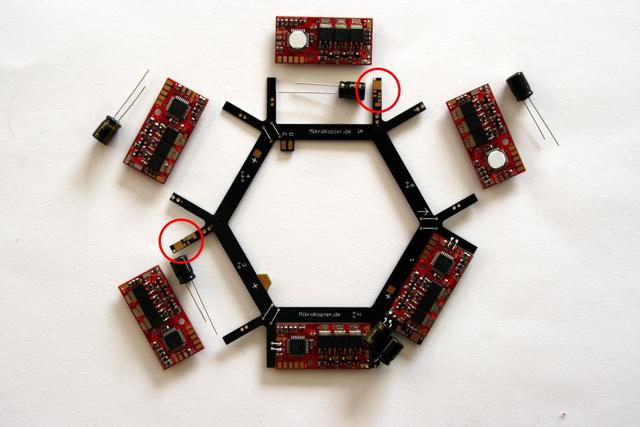
Das Verteilungssechseck mit den Motortreiberplatinen installiert
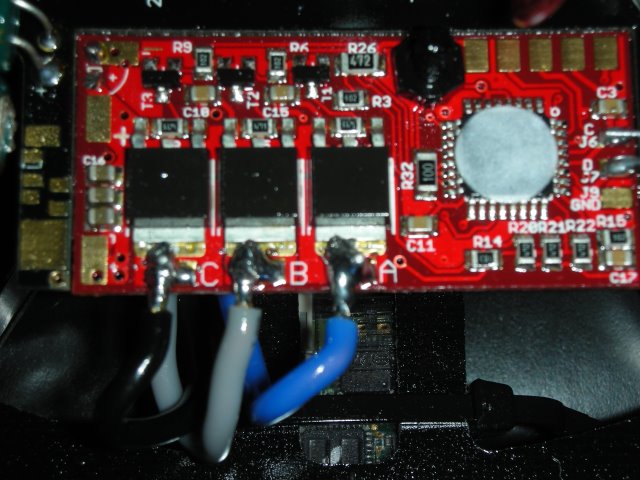
Anschließend wurden die Motortreiberplatinen mit den bürstenlosen Motoren verbunden und der Flugregler zusammengelötet. Der Höhensensor wurde in Gummischaum eingewickelt, um zu verhindern, dass der Luftstrom der Propeller den tatsächlichen Luftdruck im Flugbetrieb beeinflusst.
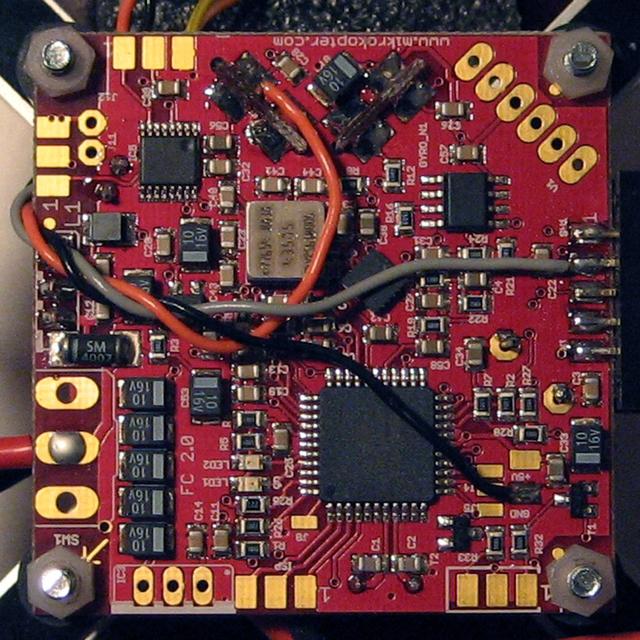
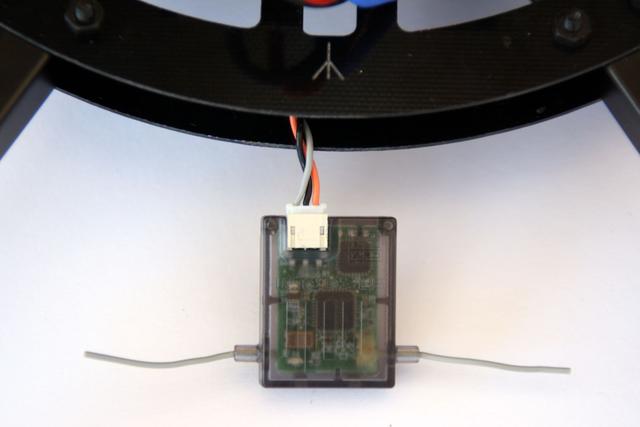
Fügen Sie nun alle Leiterplatten zu einem Tower-Aufbau zusammen. An der Oberseite befindet sich der GPS-Empfänger, sodass dem Empfang der Satellitensignale keine Hindernisse im Weg stehen. Dieses Modul besteht aus der Antenne und dem Empfänger auf einer separaten Platine.
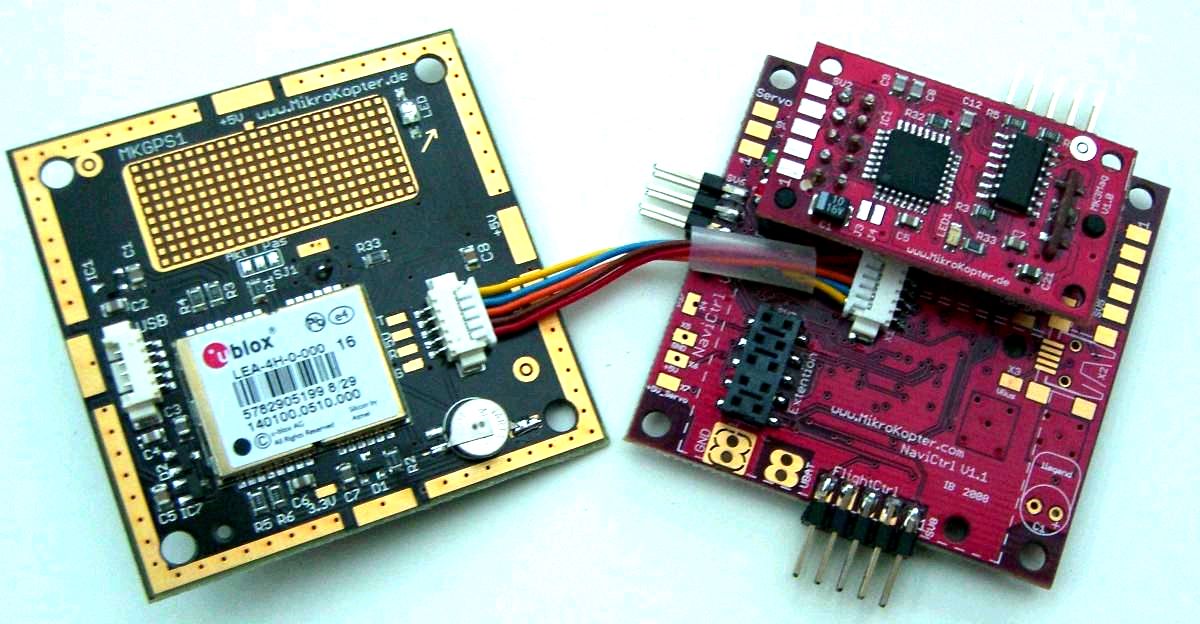
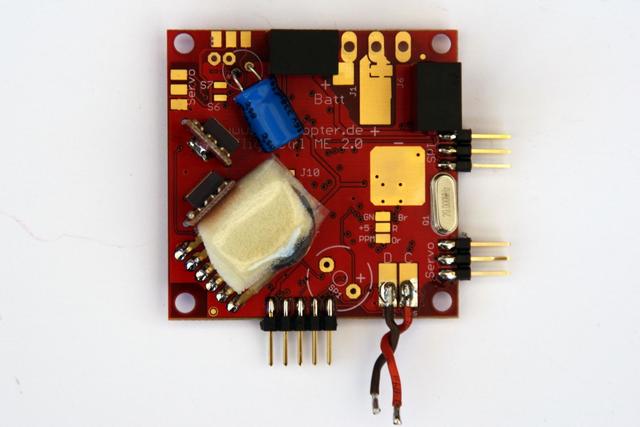
Dann kommt der Flugregler. Dieses Modul verfügt über einen Höhensensor (Druck), um festzustellen, in welcher Höhe die Drohne tatsächlich fliegt. Vor dem Flug sollte dieser Sensor beim Start kalibriert werden, um Fehlmessungen, beispielsweise beim Start einer Bergregion, zu vermeiden.
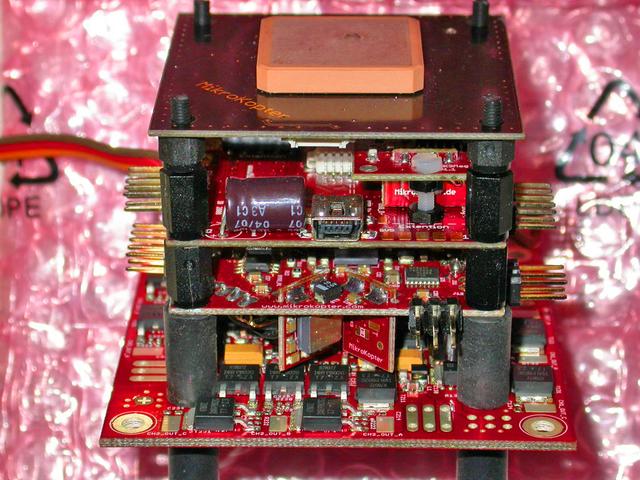
Anschließend kann der zusammengebaute Leiterplattenturm auf den Verteilersechskant gesteckt und mit 10-poligem Flachkabel miteinander verbunden werden.
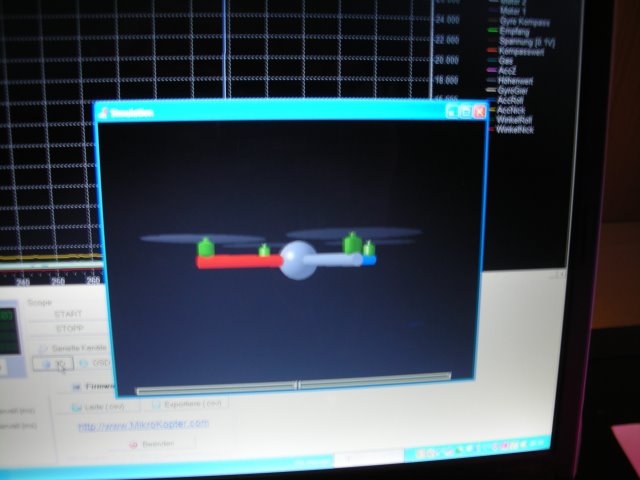
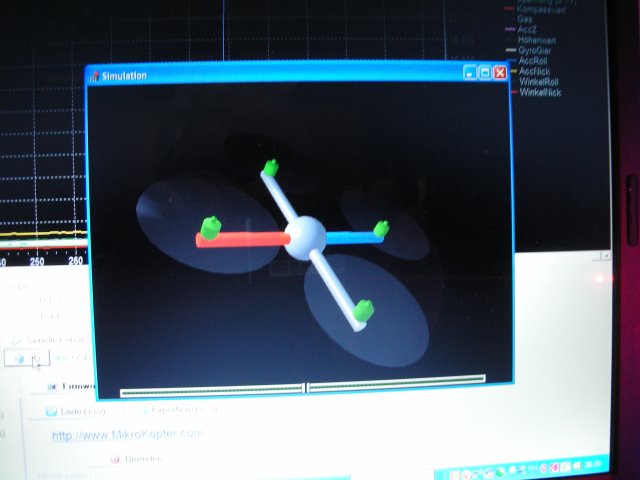
Nachdem die gesamte Baugruppe montiert ist, musste ich einige Tests durchführen, um sicherzustellen, dass alles richtig angeschlossen war und der Flugcontroller ordnungsgemäß funktionierte. Zu diesem Zweck enthält das Hexakopter-Paket eine spezielle Software, mit der Sie alle wichtigen Parameter und Signale der verschiedenen Sensoren an Bord überwachen können.


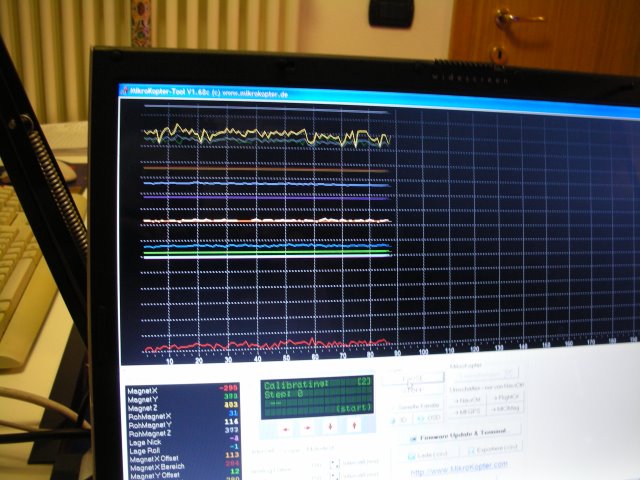
Links das USB-TTL Module zur Datenübertragung, in der Mitte die Verbindung zum Drohnenflugcontroller, links die ersten Signale der Drohnensensoren. Magnetkompass, Druck, Kurs (X, Y, Z, Beschleunigungssensoren). welche Satelliten empfangen werden, um ein sicheres automatisches Schweben zu ermöglichen, wobei die GPS-Signale zur Stabilisierung der Höhe und der X-, Y-Position der Drohne verwendet werden.

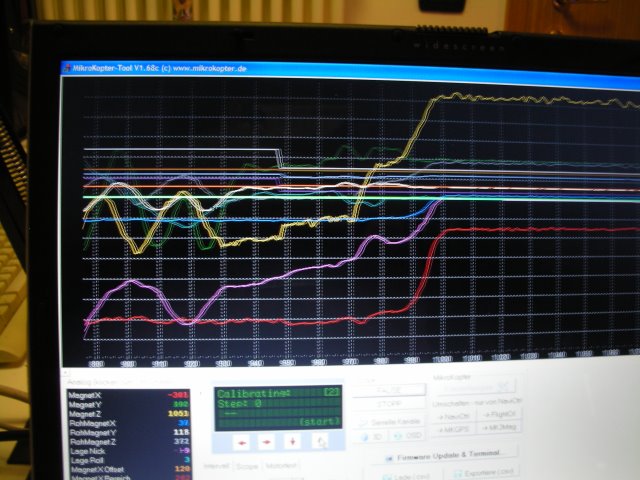
Da der erste Test im Hobbykeller durchgeführt wurde, waren keine Satellitensignale verfügbar. Jetzt habe ich die Beschleunigungssensoren getestet, die während des Fluges für die richtige Position sorgen. Richtung, Neigung, Drehung und Höhe.
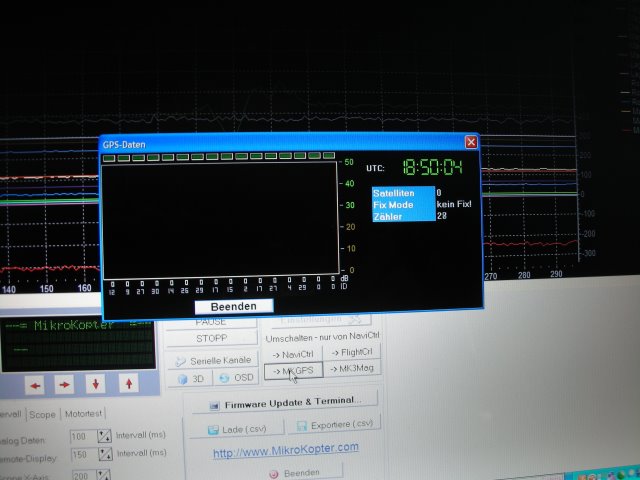
Ich ging nach draußen, um den GPS-Empfänger zu testen, und war wirklich überrascht von den guten Ergebnissen des Systems, wie Sie hier oben sehen können. Nachdem die Hauptstruktur nun aufgebaut, getestet und für den nächsten Schritt bereit war, habe ich die im Lieferumfang enthaltene Kamerahalterung montiert. Für eine kleine Kamera, wie auf den Bildern zu sehen, war die Halterung ausreichend leistungsfähig, aber ich wollte in Zukunft eine bessere Kamera einbauen, also habe ich meine eigene aus kohlenstoffverstärktem Harz hergestellt. Sie werden es später sehen.



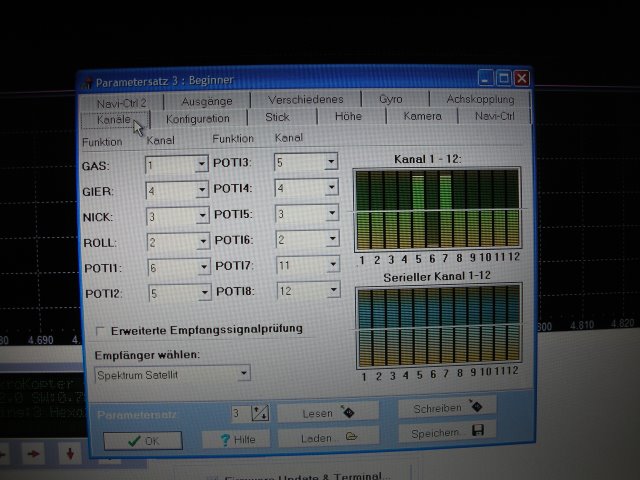
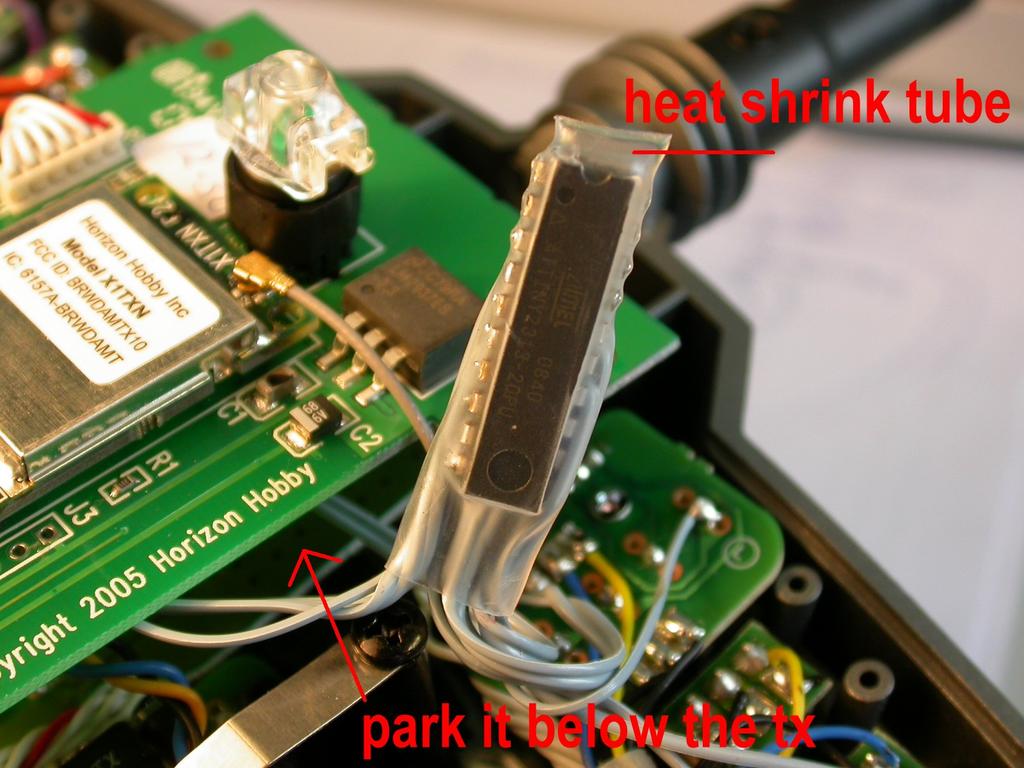
Eine Drohne kann nicht autonom fliegen, daher benötigt sie für diese Aufgabe einen Funkempfänger und eine Fernbedienung. Ich habe einen Spektrum-Funkcontroller mit 7 Kanälen gekauft, da dies die günstigste Wahl war. Dieser Controller wird mit einem winzigen 6-Kanal-Empfänger geliefert, wie in den Bildern unten gezeigt.




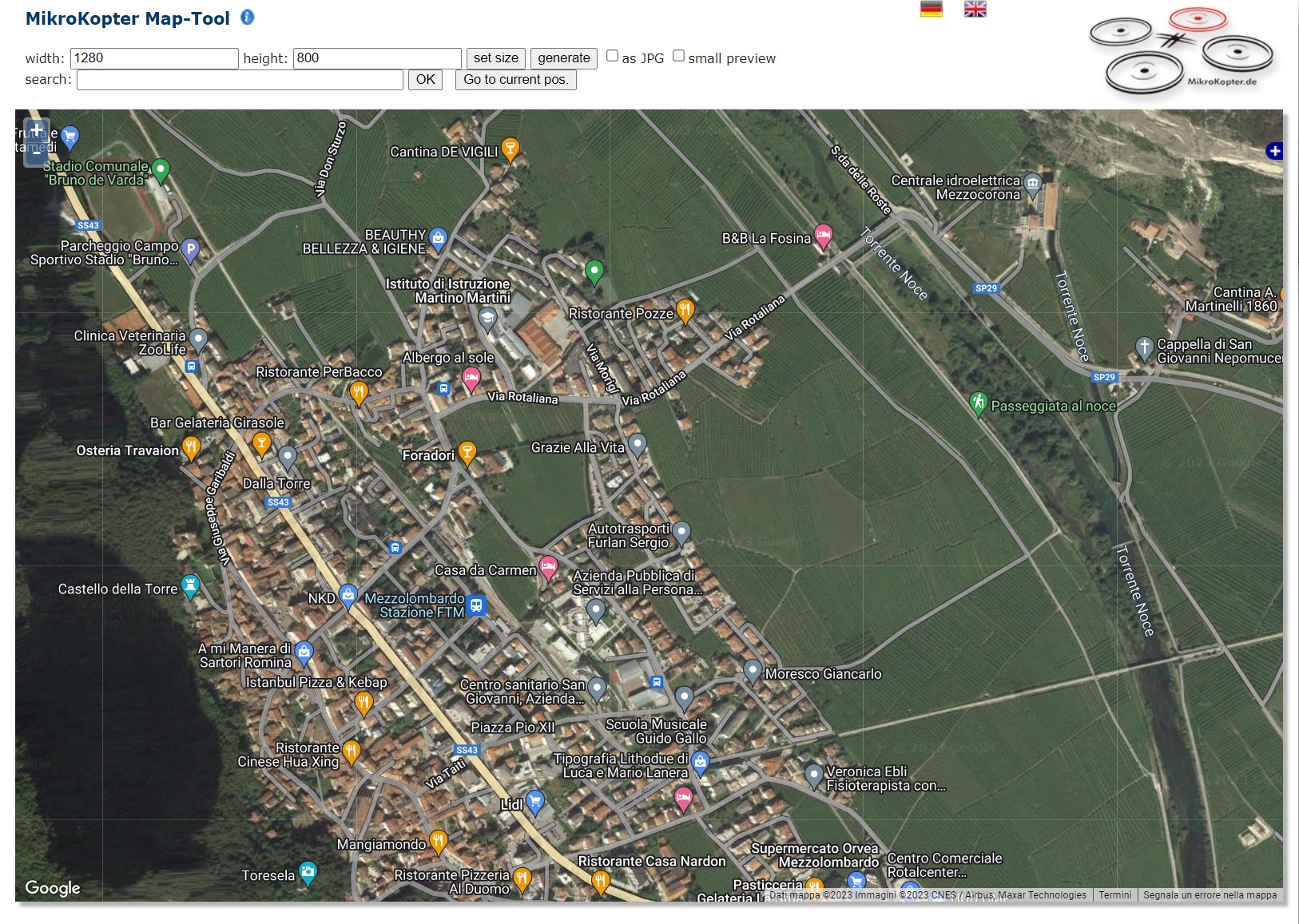
Nun war alles bereit für einen ersten Flugversuch. Ich habe mithilfe der Option „ Wegpunkt “ in der Firmware eine Geokarte eingerichtet, um zu verhindern, dass die Drohne diesen bestimmten Bereich verlässt . Mit dieser Option können Sie mehrere (geografische) Punkte festlegen, von denen bzw. zu denen Sie fliegen möchten. Dank des „Sorglos“-Modus können Sie in der Firmware festlegen, in welcher Ausrichtung sich die Drohne befindet: gedreht oder anders. Mit dieser Option wird die Drohne einfach durch Drücken der Joysticks nach rechts, links, nach vorne oder nach hinten gesteuert. Die Drohne kümmert sich um die richtige Interpretation der Empfehlungen, sodass selbst ein „Neuling“, wie ich damals war, keinen Verlust oder Schaden an der Drohne verursachen konnte.



Die neuen Beschränkungen heutzutage machen das Fliegen dieser Art von DIY-Drohnen etwas schwierig. Ich hoffe, Ihnen hat die Reise mit diesem Artikel gefallen. Leider ging das mit dieser Drohne aufgenommene Video bei einem Computerabsturz verloren. Aber schauen Sie sich vielleicht den Kanal der Entwickler an, es sind noch einige Videos übrig.