")
")
")
")

Mikrokopter -Hexakopter - Drone
In het begin:
Tegenwoordig kun je bijna overal een drone kopen, zonder montage of iets dergelijks. Open de doos, plaats de batterij erin, zet hem aan, vlieg en begin met het maken van foto's of het opnemen van een video. In die tijd waren de zaken anders.
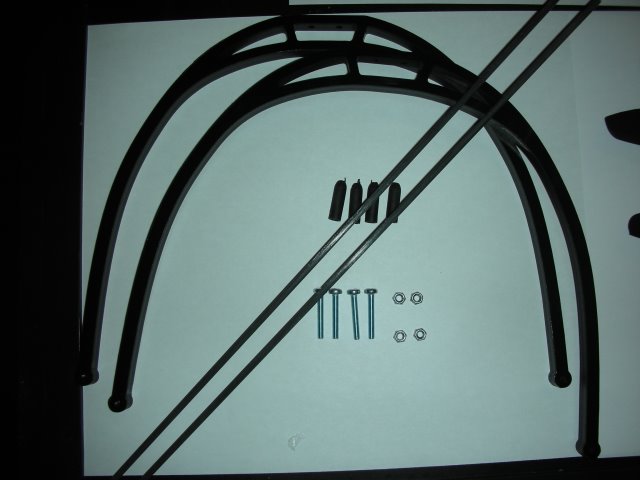
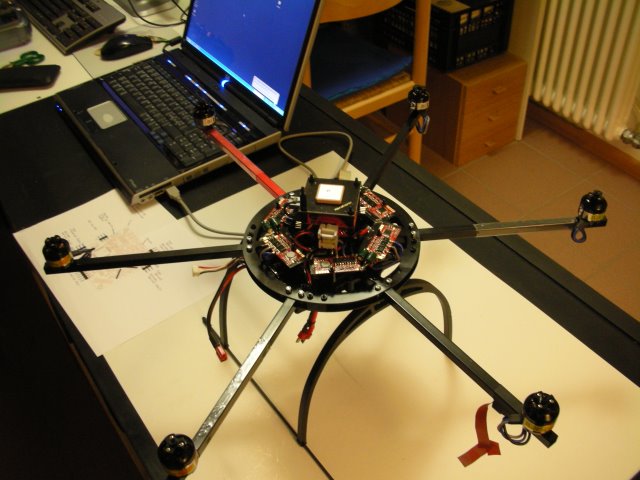
In het jaar 2008 zag ik een aantal mooie Duitse webpagina's over enkele amateurs die een drone hadden ontwikkeld (Quad, Hexa, Octo), allemaal met open-source firmware en mooi geconstrueerde hardware. Er was ook een forum (dat is helaas verdwenen) waar de hele "Mikrokopter-gemeenschap" hun ervaringen uitwisselde, met hints en tips over hoe je de algehele prestaties van je eigen drone kunt verbeteren. Het was best interessant en ik besloot een van de eerdere modellen te kopen, een zogenaamde Hexakopter. ja geschreven met een "K" omdat het allemaal in Duitsland is gebaseerd. Het pakket komt als een soort doe-het-zelf-project, alle onderdelen zijn aanwezig, maar je moest het zelf bouwen en monteren, een vroeg soort IKEA-spul. Als je alles uitpakt, ziet het er ongeveer zo uit.







Op de website Mikrokopter.de was een speciale pagina over hoe je alles in elkaar kon zetten, het was een zeer uitgebreide documentatie en ik ondervond geen enkele moeite met het bouwen van de "standaard" versie van de Hexakopter. Er zijn feitelijk drie verschillende documenten, de eerste gaat over de elektronica, PCB's en dergelijke. Het tweede type is de mechanische constructie, met alle kleine schroeven, bussen, moeren, enz. Het derde en belangrijkste onderdeel was de firmware, het laden en aanpassen ervan voor gebruik door een "newbie" zoals ik.
Ik ging eerst verder met het bouwen van het mechanische gedeelte, omdat je een solide basis nodig hebt om later de elektronica op te zetten. Hier zijn enkele foto's van het proces.

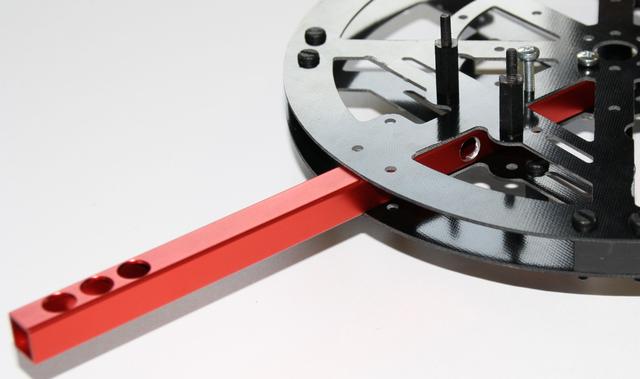
Het rode aluminium profiel is de hoofdbalk als motorsteun, de rode kleur (slechts één van de balken) geeft de voorkant van de drone aan. De overige 5 zijn zwart en zijn daarna gemonteerd.


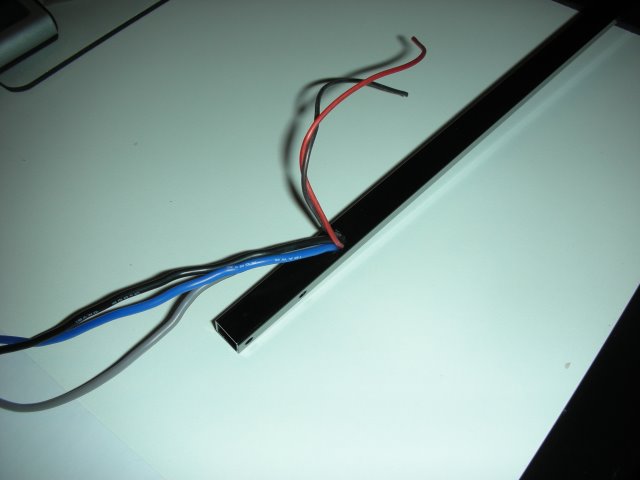
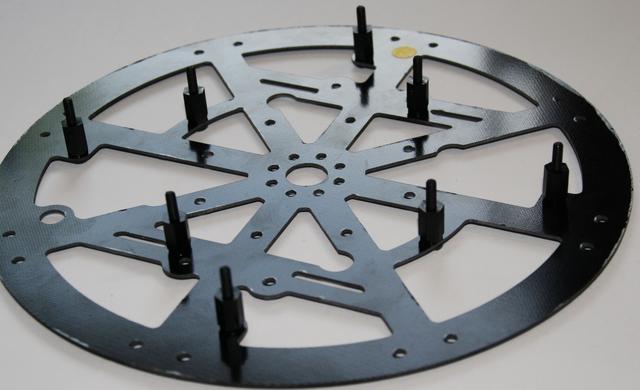
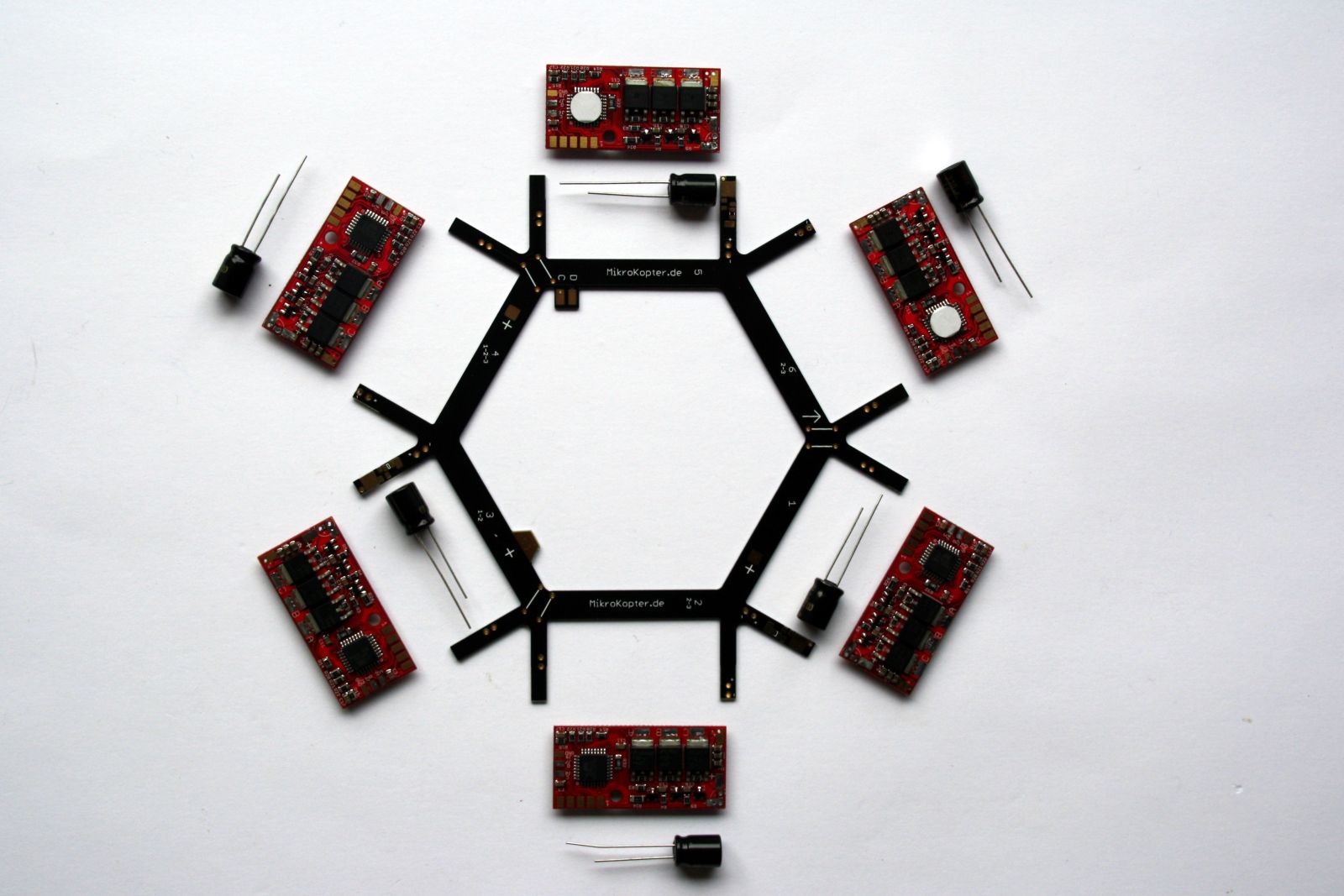
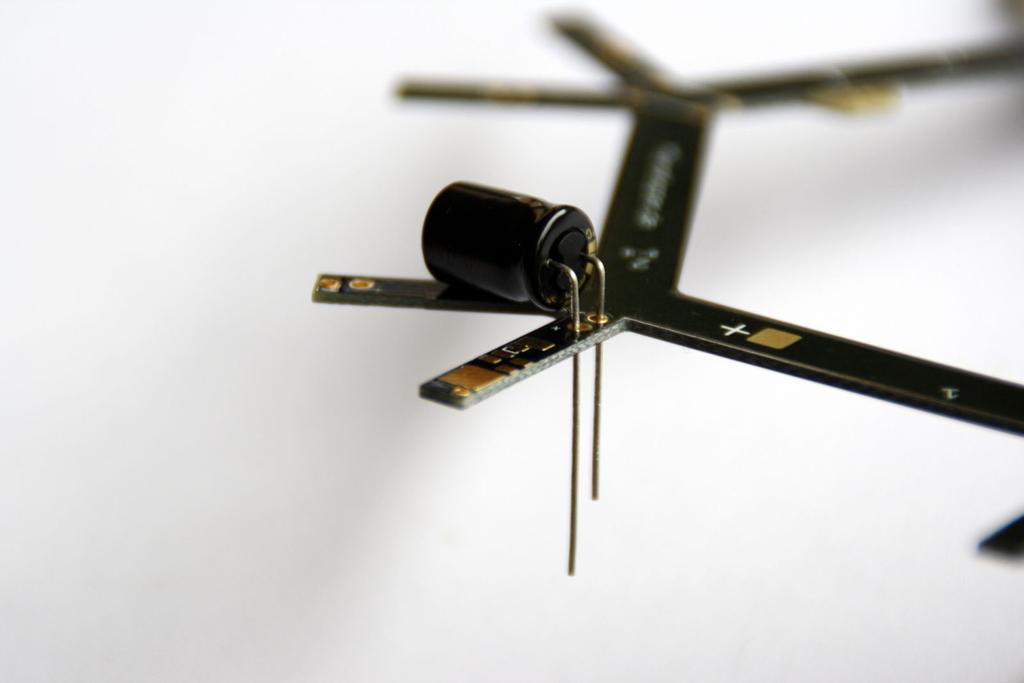
Vervolgens zijn de borstelloze motoren gemonteerd en tegelijkertijd heb ik de draden voor de LED-strips ingevoerd die onder de balken worden gemonteerd. Eén LED-streep gaat op de rode straal met rode LED's om de oriëntatie van de drone te zien bij slecht zicht. De overige twee LED-strips, groen, zijn aan de achterkant gemonteerd. Op het eerste gezicht lijken al die draden en dergelijke een beetje chaos te veroorzaken, maar de ontwikkelaars hebben daar ook over nagedacht en een soort elektrische distributieschijf gemaakt waar alles netjes bij elkaar komt.



.
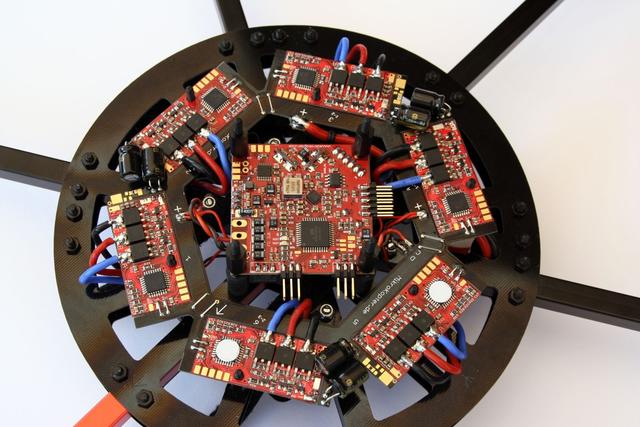
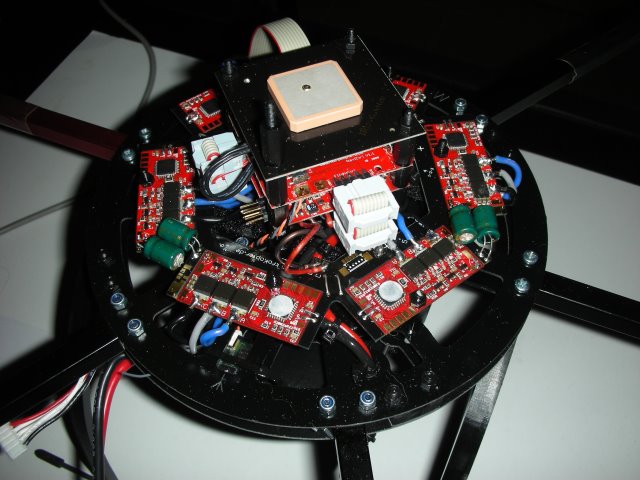
De distributiezeshoek met de printplaten van de motorbesturing
Nu de balken. motoren en de distributiezeshoek klaar zijn, is er tijd om wat elektronica in elkaar te zetten, zoals de motordrivers, het GPS-systeem, de vluchtcontroller en het ontvangergedeelte. Het was een lang en langzaam stapsgewijs proces om fouten te voorkomen, omdat een rokerige startup erg duur zou zijn geweest.
De distributiezeshoek met de printplaten van de motorbesturing
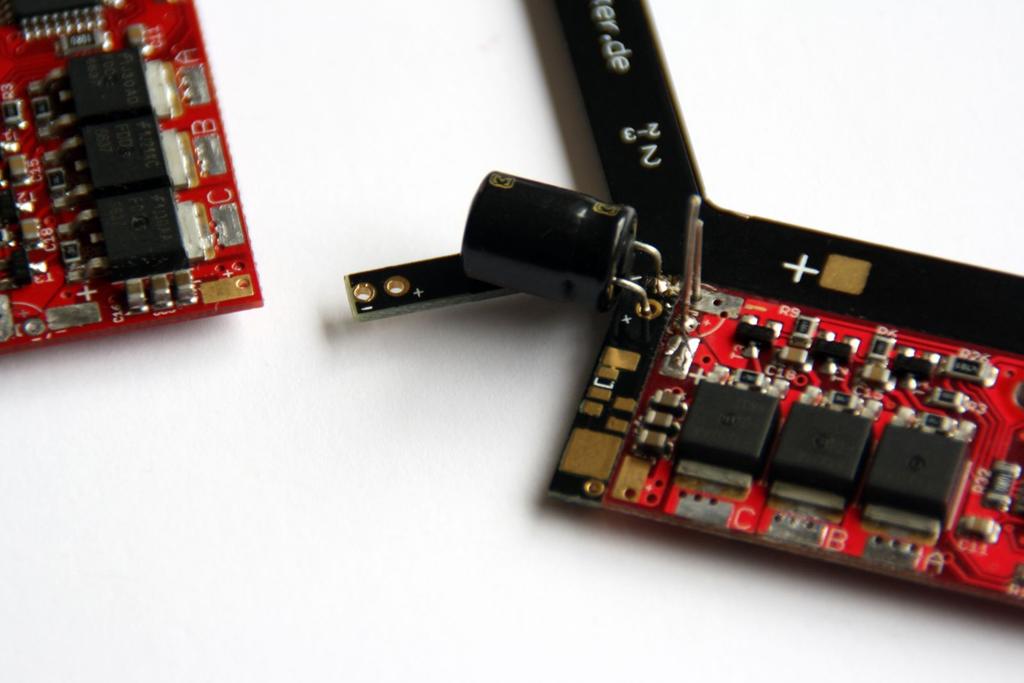
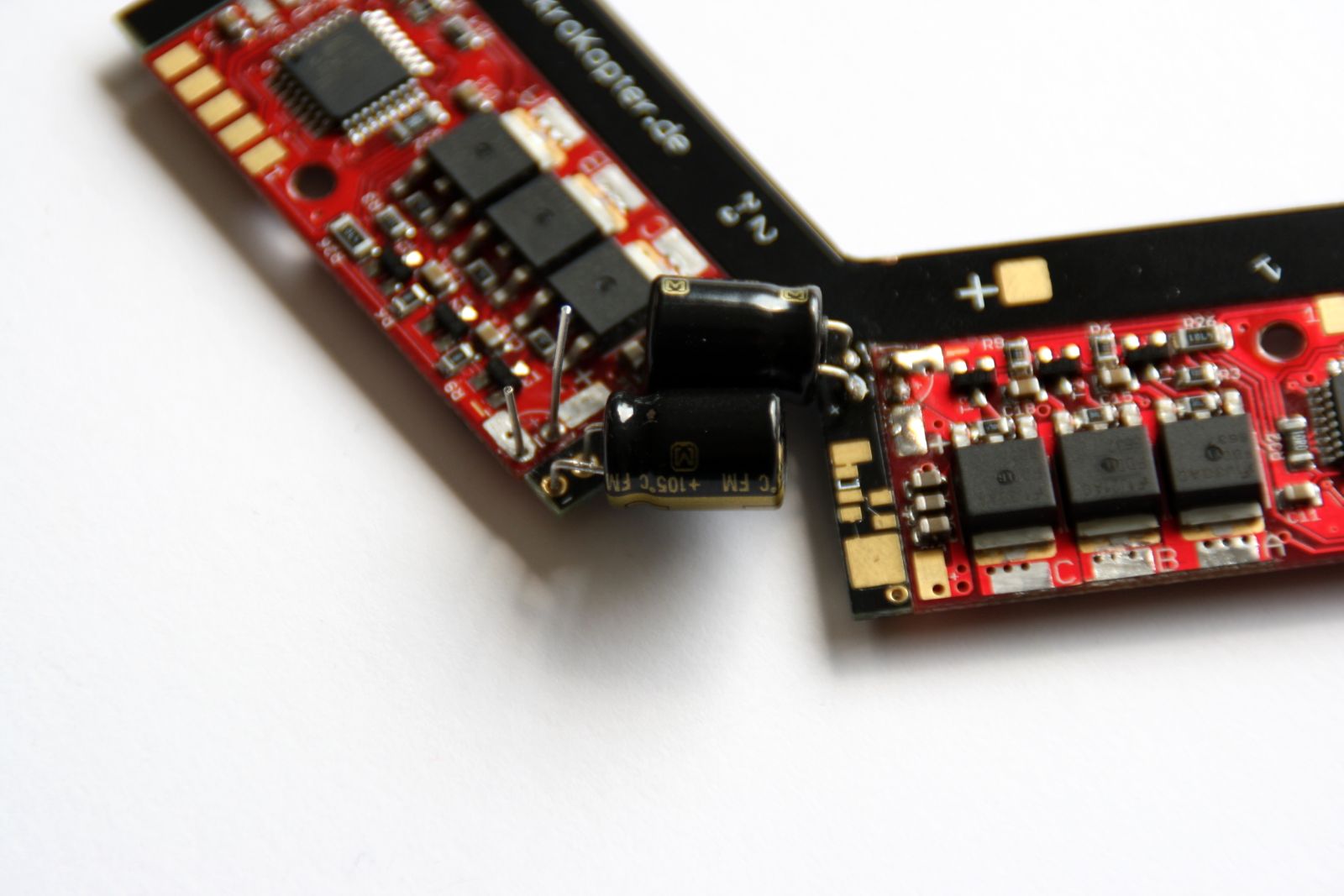
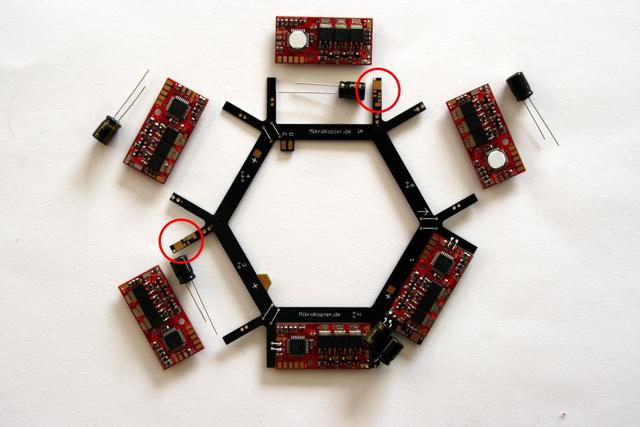
De distributiezeshoek met de printplaten van de motorbesturing
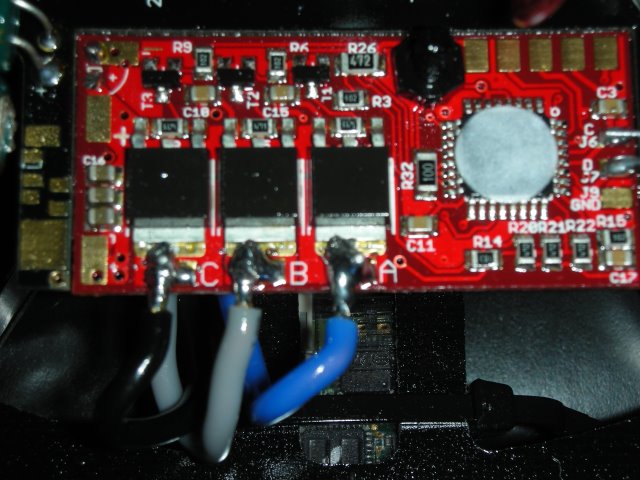
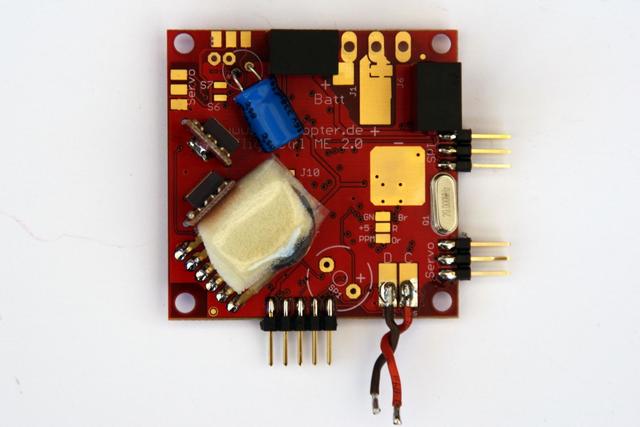
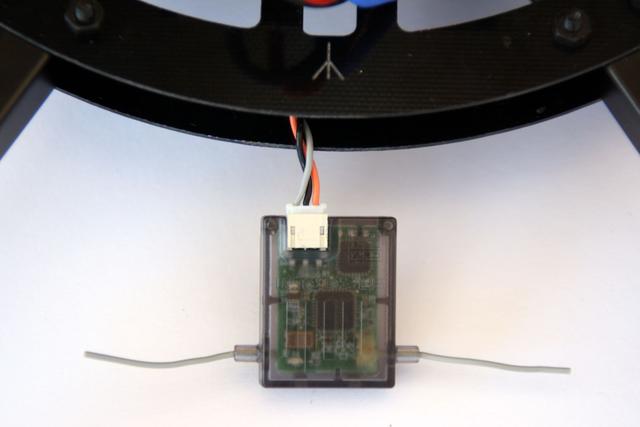
Vervolgens werden de printplaten van de motoraansturing op de borstelloze motoren aangesloten en werd de vluchtcontroller aan elkaar gesoldeerd. De hoogtesensor werd in rubberschuim gewikkeld om te voorkomen dat de luchtstroom van de propellers de werkelijke luchtdruk tijdens het vliegen zou beïnvloeden.
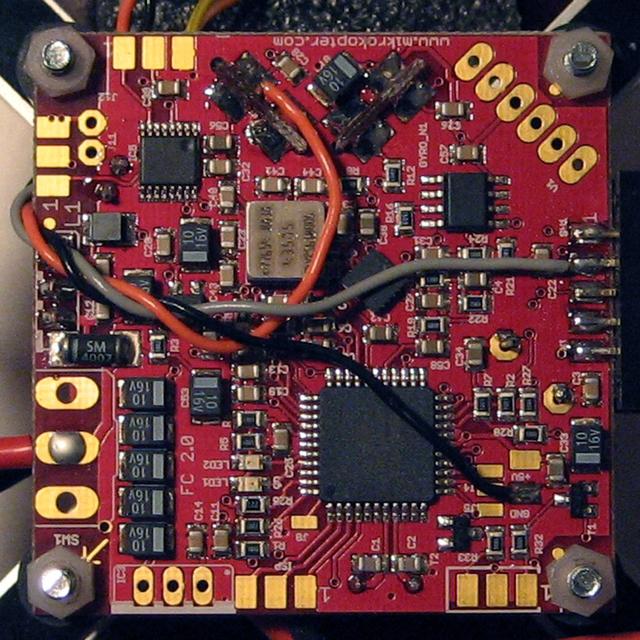
Nu alle printplaten samenvoegen in een torenopstelling. Bovenaan de GPS-ontvanger zodat er geen obstakels in de weg staan om de satellietsignalen te ontvangen. Deze module bestaat uit de antenne en de ontvanger op een aparte printplaat.
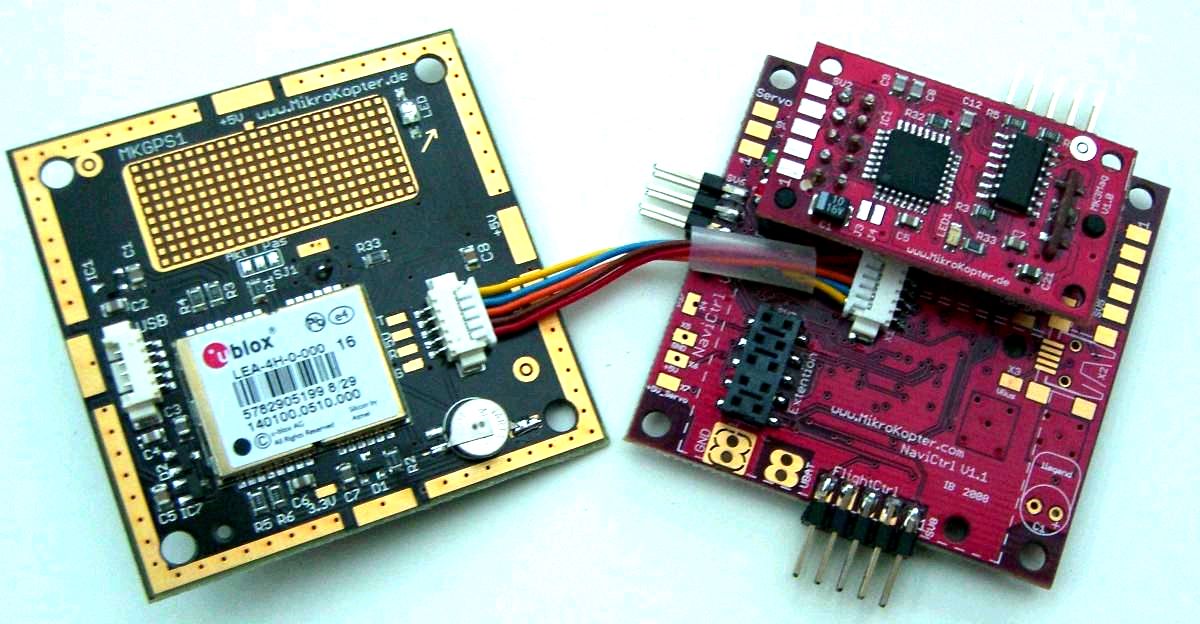
Dan komt de flight controller, deze module beschikt over een hoogtesensor (druk) om vast te stellen op welke hoogte de drone daadwerkelijk vliegt. Vóór de vlucht moet deze sensor aan het begin worden gekalibreerd om foutieve metingen te voorkomen, bijvoorbeeld bij het starten van een berggebied.
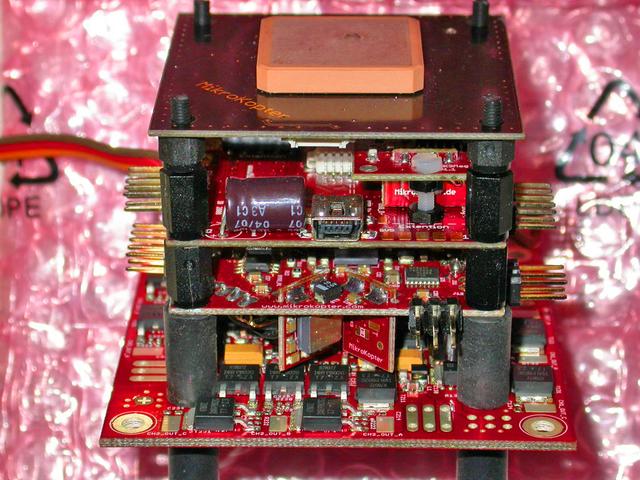
Vervolgens kan de gemonteerde PCB-toren op de zeshoekige distributie worden gezet en met een 10-polige vlakkabel met elkaar worden verbonden.
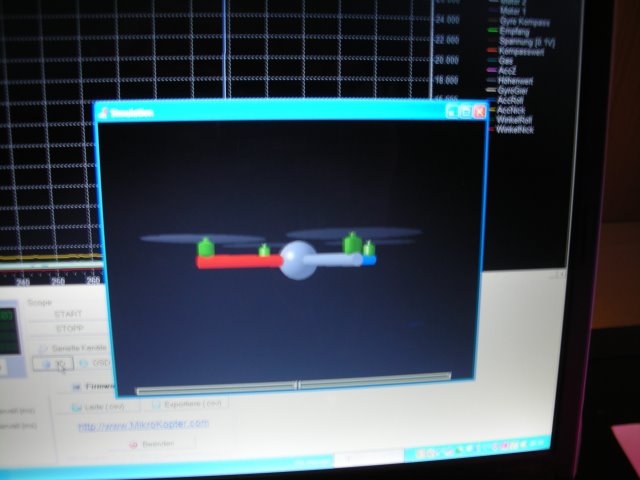
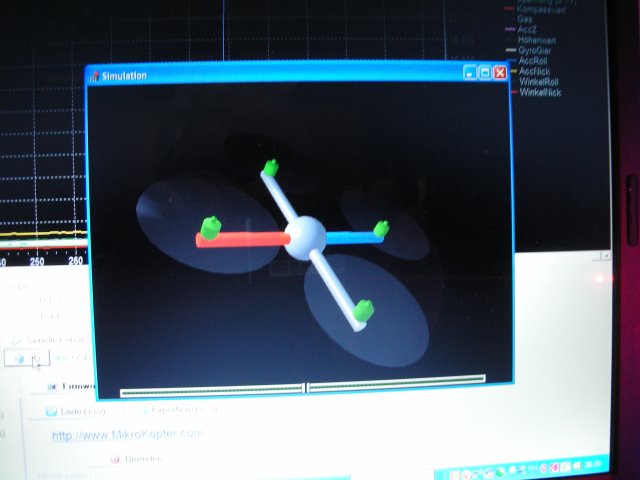
Nu de hele constructie is gemonteerd, moest ik een aantal tests uitvoeren om er zeker van te zijn dat alles correct was aangesloten en dat de vluchtcontroller naar behoren werkte. Om dit te doen, wordt het Hexakopter-pakket geleverd met speciale software waarmee u allerlei belangrijke parameters en signalen kunt monitoren die afkomstig zijn van de verschillende sensoren aan boord.


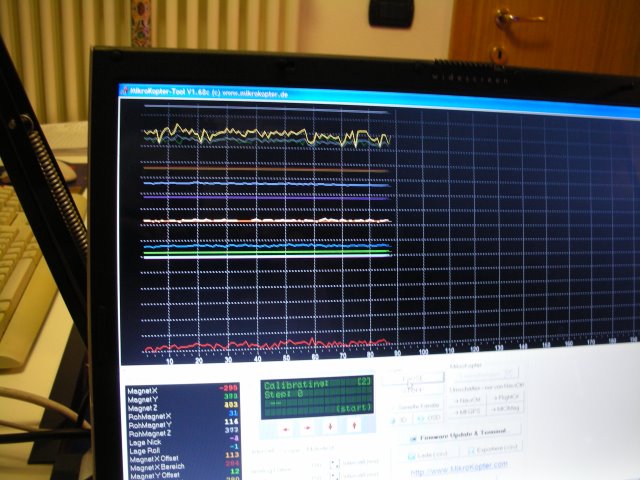
Links de USB-TTL converter voor datatransmissie, in het midden verbonden met de drone-vluchtcontroller, links de eerste signalen van de drone-sensoren. Magnetisch kompas, druk, koers (X, Y, Z, versnellingssensoren). welke satellieten worden ontvangen om veilig automatisch zweven mogelijk te maken, waarbij de GPS-signalen worden gebruikt om de hoogte en X-, Y-positie van de drone te stabiliseren.

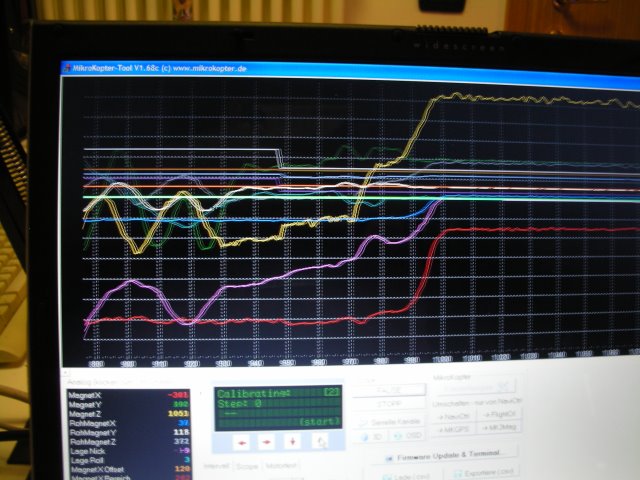
Omdat de eerste test in de hobbykelder werd uitgevoerd, waren er geen satellietsignalen beschikbaar. Nu heb ik de versnellingssensoren getest die tijdens de vlucht voor de juiste positie zorgen. Koers, kantelen, roteren en hoogte.
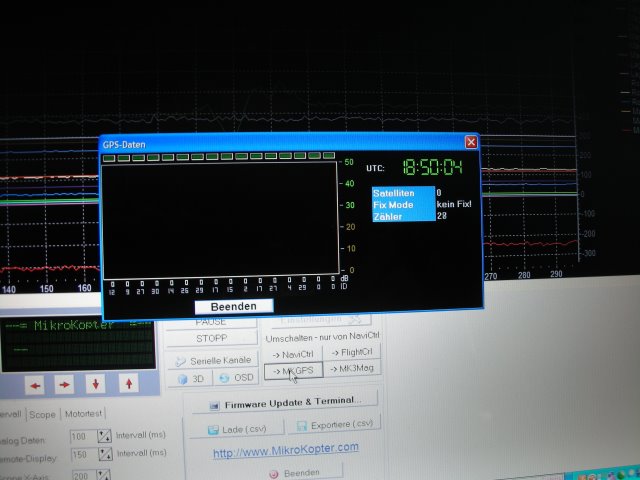
Ik ging naar buiten om de GPS-ontvanger te testen en was echt verrast door de goede resultaten van het systeem, zoals je hierboven kunt zien. Nu de hoofdstructuur was gebouwd, getest en klaar voor de volgende stap, heb ik de camerabeugel gemonteerd die bij het pakket wordt geleverd. Voor een kleine camera zoals te zien op de foto's presteerde de beugel voldoende, maar ik wilde in de toekomst een betere camera plaatsen, dus heb ik mijn eigen camera gemaakt van met koolstof versterkte hars, je zult het later zien.



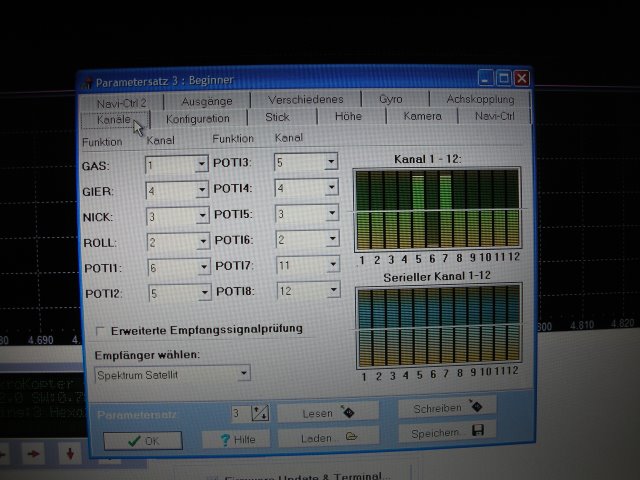
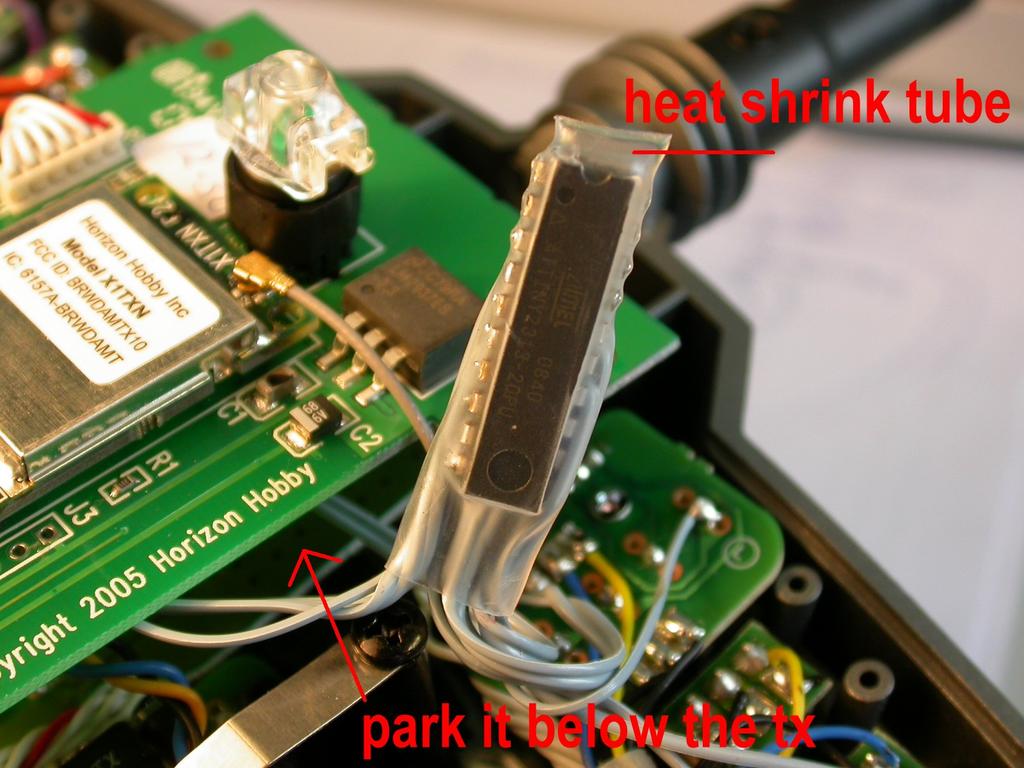
Een drone kan niet autonoom vliegen, dus heeft hij een radio-ontvanger en een afstandsbediening nodig om zijn werk te doen. Ik kocht een Spektrum-radiocontroller met 7 kanalen omdat dit de goedkoopste keuze was. Deze controller wordt geleverd met een kleine 6-kanaalsontvanger, zoals weergegeven in de onderstaande afbeeldingen.




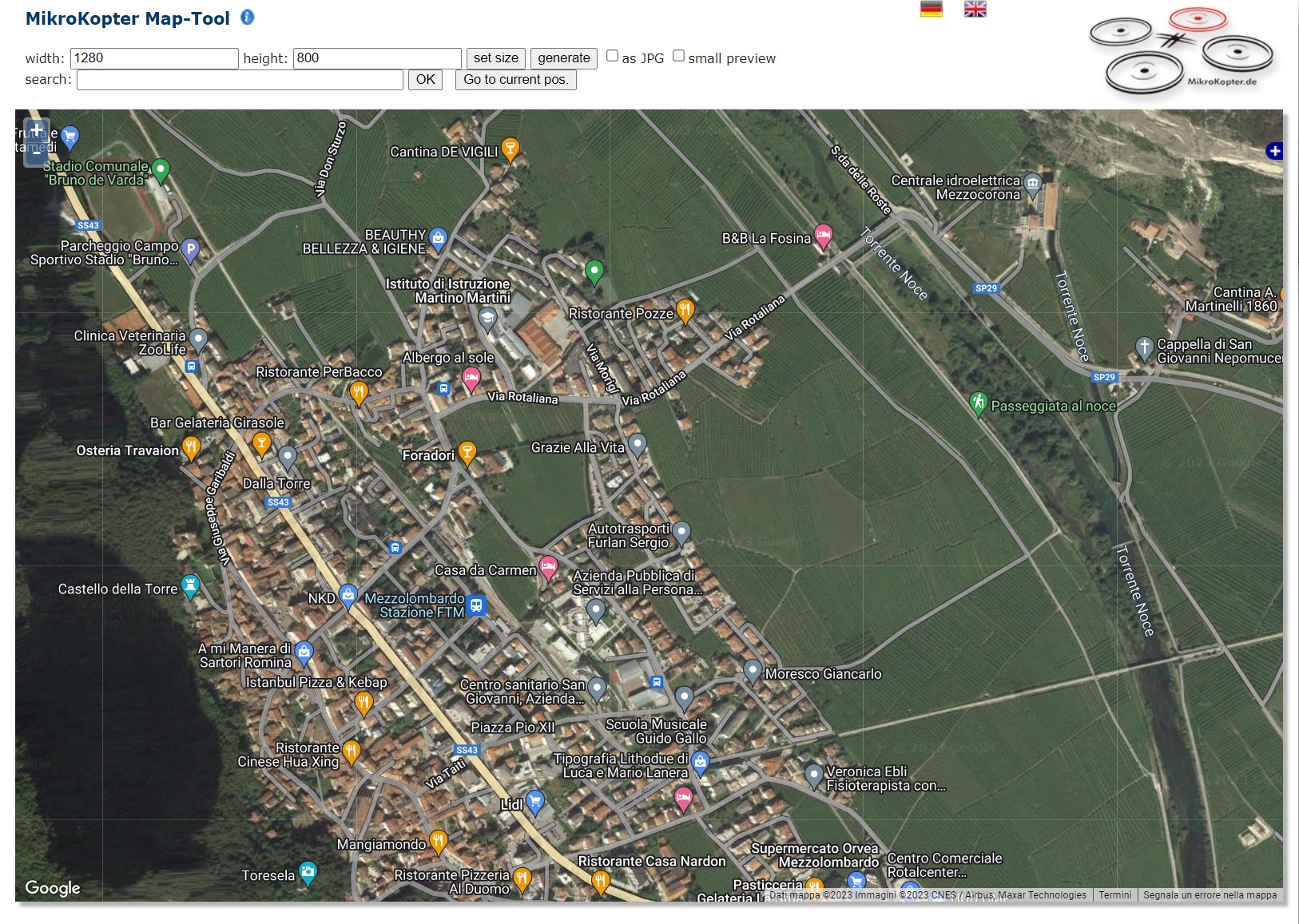
Nu alles klaar was om een eerste vluchtpoging te doen, heb ik een Geo-Map opgezet om te voorkomen dat de drone buiten dit specifieke bereik komt, met behulp van de " Waypoint " -optie in de firmware. Met deze optie kunt u meerdere (geografische) punten instellen waar u naartoe of vandaan kunt vliegen. Vanwege de "zorgeloze" modus, die je in de firmware kunt instellen, ongeacht de richting waarin de drone zich bevindt, gedraaid of anders, bestuurt deze optie de drone door de joysticks naar rechts, links, vooruit of achteruit te duwen. De drone zorgt ervoor dat de complimenten goed worden geïnterpreteerd, zodat zelfs een "newbie", zoals ik destijds was, geen verlies of schade aan de drone kan veroorzaken.



De nieuwe beperkingen maken het vliegen met dit soort DIY-drones tegenwoordig wat lastig. Ik hoop dat je genoten hebt van je reis met dit artikel. Helaas zijn de video's die met deze drone zijn gemaakt verloren gegaan bij een computercrash. Maar kijk misschien eens op het kanaal van de ontwikkelaars, er zijn nog enkele video's over.